





https://www.youtube.com/watch؟v=zeWakBktTSs
الدافع المستقل الأول للاجتهاد: يعتمد الاجتهاد على كاميرات الملاحة اليمنى واليسرى. كاميرتان تعرضان منظور العربة الجوالة أثناء القيادة الأولى للمركبة باستخدام Autona ، وهي وظيفة ملاحة تلقائية. الائتمان: NASA / JBL-Caltech
تهبط المركبة الجوالة الجديدة التابعة للوكالة على سطح المريخ باستخدام نظام ملاحة آلي تمت ترقيته حديثًا.
يبدأ روبوت ناسا الجديد ذو الست عجلات ، العربة الجوالة الدؤوبة ، في رحلة ملحمية عبر المريخ إلى موقع فوهة البركان بحثًا عن علامات على الحياة القديمة. أي أن فريق العربة الجوالة منخرط بعمق في تخطيط طرق الملاحة ، وتوليد التعليمات ، وحتى ارتداء نظارات ثلاثية الأبعاد خاصة.
ولكن على نحو متزايد ، باستخدام نظام الملاحة التلقائي القوي ، ستتولى العربة الجوالة مسؤولية القيادة تلقائيًا. ينشئ هذا النظام المتقدم ، المسمى Autonav ، خرائط ثلاثية الأبعاد للمناظر الطبيعية أمامك ، ويحدد المخاطر ، ويخطط لمسار حول أي عوائق دون توجيه إضافي من وحدات التحكم على الأرض.
وفقًا لـ Vandi Verma ، كبير المهندسين في مختبر الدفع النفاث التابع لناسا في جنوب كاليفورنيا ، ومخطط وسائق المركبات الجوالة ، فإن Vandi Verma لديه موهبة في “التفكير أثناء القيادة”. “العربة الجوالة تفكر في القيادة الذاتية عندما تدور عجلاتها”.
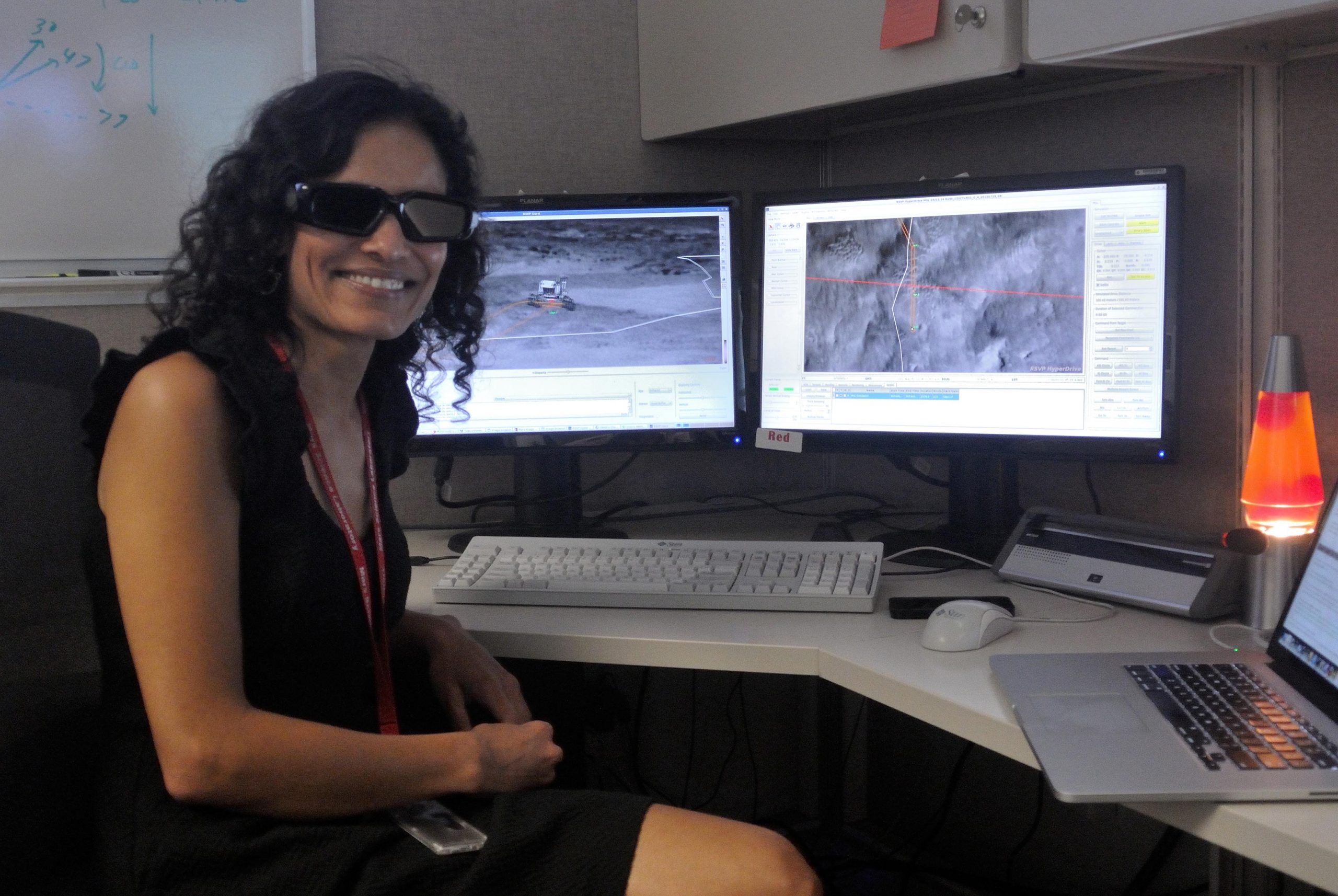
النظارات ثلاثية الأبعاد المستخدمة في قيادة العربة الجوالة: يعمل Vandi Verma ، المهندس الذي يعمل الآن مع روفر المريخ الدؤوب التابع لوكالة ناسا ، هنا كسائق لمركبة Curiosity. لا يزال سائقي المركبات الجوالة يستخدمون النظارات ثلاثية الأبعاد الخاصة التي يرتديها للكشف بسهولة عن التغيرات في التضاريس التي يجب على العربة الجوالة تجنبها. الائتمان: NASA / JBL-Caltech
ستتيح هذه القدرة ، إلى جانب التحسينات الأخرى ، زيادة الاجتهاد إلى 393 قدمًا (120 مترًا) في الساعة ؛ يتميز سلفه ، Curiosity ، بإصدار سابق من Autona ، والذي يمتد لحوالي 66 قدمًا (20 مترًا) في الساعة أثناء تسلق جبال شارب الجنوبية الشرقية.
قال مايكل ماكهنري ، وهو جزء من جبهة مجال الحركة وجزء من مخططي روفر في JBL: “لقد رفعنا Autona أربع أو خمس مرات أسرع”. “نحن نقود مسافة أبعد كثيرًا في وقت أقل مما أثبتته كيوريوسيتي.”
عندما تبدأ جهود Jessero Greater على الأرض حملتها العلمية الأولى ، سيكون Autonav عاملاً رئيسياً في المساعدة على القيام بهذا العمل.
كانت هذه الحفرة عبارة عن بحيرة ، عندما كان المريخ ، منذ مليارات السنين ، أكثر رطوبة مما هو عليه اليوم ، والهدف من الاجتهاد هو دلتا النهر الجاف على حافة فوهة البركان. إذا تم اكتشاف الحياة في وقت مبكر من المريخ ، فيمكن رؤية علاماتها هناك. ستجمع العربة الجوالة عينات على مسافة حوالي 9 أميال (15 كيلومترًا) ثم تعد عينات لجمعها من خلال مشروع مستقبلي سينقلها إلى الأرض لتحليلها.
قالت جينيفر تروسبير ، التي عملت في جميع مركبات المريخ التابعة لوكالة ناسا وهي مديرة مشروع Mars 2020 Perseverance Rover: “يمكننا الوصول إلى حيث يريد العلماء أن يذهبوا بأسرع ما يمكن”. “الآن يمكننا القيادة بدلاً من المرور عبر هذه التضاريس المعقدة: لم يكن هذا شيئًا يمكننا القيام به من قبل.”
عضو بشري
لا يمكن الحصول على الاجتهاد وحده في Autona. من المهم مشاركة فريق العربة الجوالة في التخطيط وقيادة مسار المثابرة. يخطط فريق الخبراء بأكمله لتشغيل العربة الجوالة ويخلق مسارًا للملاحة يستكشف الجانب المثير للاهتمام جغرافيًا على طول الطريق إلى وجهتها أو يأخذ عينات بسرعة.
https://www.youtube.com/watch؟v=zHXtZIYHRo8
محاكاة حاسوبية لمحرك الاجتهاد الأول المستقل: تُظهر محاكاة الكمبيوتر هذه استخدام ناسا الدؤوب لأول تنقلاتها لمركبة المريخ باستخدام ميزة الملاحة الآلية الخاصة بها ، والتي تسمح لها بتجنب الصخور والمخاطر الأخرى دون مدخلات من المهندسين الأرضي. الائتمان: NASA / JBL-Caltech
بسبب تأخر إشارة الراديو بين الأرض والمريخ ، لم يتمكنوا من تحريك Royer للأمام باستخدام عصا التحكم. بدلاً من ذلك ، يستكشفون صور القمر الصناعي وأحيانًا يرون تلك النظارات ثلاثية الأبعاد على سطح المريخ بالقرب من المسبار. عندما يغادر الفريق ، يشقون طريقهم إلى المريخ ، وفي اليوم التالي تنفذ المركبة الجوالة هذه التعليمات.
تم تعديل عجلات الاجتهاد للمساعدة في معرفة مدى سرعة تنفيذ هذه المشاريع: احذر من أن كل منها يحتوي على 48 معالجًا يبدو خطوطًا مموجة قليلاً ، مقارنةً بـ 24 منها على شكل شيفرون من Curiosity ، لأنها كانت أكبر قليلاً في القطر وأضيق من عجلات الفضول. الأهداف هي المساعدة في الجر والمتانة.
قال دروسبر: “لم يستطع Autonav بسبب الفضول بسبب مشكلة تآكل العجلة”. “في بداية الرحلة ، استمتعنا بالصخور الصغيرة والحادة والتوجيهية التي بدأت في إحداث ثقوب في العجلات ، ولم يفوتنا جهاز Autonav الخاص بنا.”
كلما زادت المساحة المسموح بها للمثابرة ، تساعد العربة الجوالة على التدحرج بأمان على أرض صلبة – بما في ذلك الصخور ذات الحجم الجيد. ENav ، أو التنقل المتقدم ، عبارة عن مزيج من الخوارزمية والبرامج في قدرات التنقل التلقائي للحوم البقري من الاجتهاد ، والتي تسمح باكتشاف أكثر دقة للمخاطر.
على عكس سابقاتها ، يمكن لـ Diligence استخدام أحد أجهزة الكمبيوتر الخاصة بها للتنقل السطحي ؛ يمكن لجهاز الكمبيوتر الرائد أن يكرس نفسه للعديد من المهام التي تحافظ على صحة المركبة ونشاطها.
قام عنصر حساب الرؤية هذا ، أو VCE ، بتوجيه دخوله بجدية إلى سطح المريخ ونزوله وهبوطه في فبراير. تستخدم الآن بدوام كامل لرسم خريطة لرحلة العربة الجوالة ، بينما تساعد في نفس الوقت على تجنب المشاكل على طول الطريق.
تراقب العربة الجوالة أيضًا مدى تحركها من مكان إلى آخر باستخدام نظام يسمى “القياس الآلي البصري”. يقبض اليقظة عند نقل الصور من وقت لآخر ، ومقارنة موضع واحد بالموضع التالي لمعرفة ما إذا كان قد تحرك المسافة المتوقعة.
يقول أعضاء الفريق إنهم يتطلعون إلى السماح لأوتونا بـ “تولي القيادة”. لكنهم أيضًا على استعداد للتدخل عند الحاجة.
ما الذي يقود على المريخ؟ يقول المخططون والسائقون إنه لن يصبح قديمًا أبدًا.
قال فيرما: “جيسيرو لا يصدق”. “لقد علمنا بذلك ببساطة. عندما ترتدي نظارات ثلاثية الأبعاد ، فإنك ترى قيمة أكبر في المناظر الطبيعية. أحدق في الصور في بعض الأيام. “

“متعصب التلفزيون. مدمن الويب. مبشر السفر. رجل أعمال متمني. مستكشف هواة. كاتب.”
More Stories
خريطة جديدة للمريخ تكشف عن “هياكل” مخفية تحت سطح المريخ
زوج من نفاثات البلازما الضخمة تندلع من ثقب أسود هائل | الثقوب السوداء
الأسمنت المستوحى من عظام الإنسان أصعب بخمس مرات من الخرسانة العادية